Chapter 6: Convergent Cross Mapping¶
Prepared by: Prince Joseph Erneszer Javier
Introduction¶
In the previous chapters we talked about Simplex Projection, a forecasting technique that looks for similar trends in the past to forecast the future by computing for nearest neighbors on an embedding. In this chapter, we discuss Convergent Cross Mapping (CCM) also formulated by Sugihara et al., 2012 as a methodology that uses ideas from Simplex Projection to identify causality between variables in a complex dynamical system (e.g. ecosystem) using just time series data.
We will go through the key ideas of CCM, how it addresses the limitations of Granger causality, and the algorithm behind it. We will then test the CCM framework on simulated data where we will deliberately adjust the influence of one variable over the other. Finally, we will apply CCM on some real world data to infer the relationships between variables in a system.
causal-ccm Package¶
This chapter explains the CCM methodology in detail. If you wish to apply this in your own projects, install the framework using pip install causal-ccm. See using_causal_ccm_package.ipynb notebook for details how to use.
Importance of Understanding Causality¶
We define causality as the influence of one variable on another. Understanding causality is important because it allows us to:
Explain phenomena that they are not necessarily supernatural/paranormal
Anticipate the future and make the necessary adjustments
Apply interventions in the system to achieve desired outcomes
Limitations of Granger Causality¶
In chapter 4, we talked about a framework for establishing causality in a system called Granger Causality. However Granger Causality has its limitations.
The intuition behind Granger causality is that a variable A causes B if we have a model that improves prediction of B if we include A. This framework assumes that we can “separate” the information about A from the rest of the system. However, in many systems that have interacting parts, information about a variable may not necessarily be removable from the rest of the system. They are integrated or in other words, not separable.
Granger causality framework does not apply to cases where information about variables are not separable from the rest of the system especially for those whose causalities are weak to moderate (like in our test systems in the following sections). Finally, Granger Causality is dependent on the performance of a linear predictive model that assumes linear combination of variables. This model may not perform well for some systems that need nonlinear models to improve predictions.
CCM addresses limits of Granger causality¶
Convergent Cross Mapping is designed to identify and quantify causalities in systems whose variables are not separable. Beyond this, it is designed to identify and quantify weak to moderate causalities, which Granger Causality may miss. Finally, CCM is independent of a predictive model so we’re not at the mercy of model performance.
Related Concepts¶
We briefly discuss key concepts related to CCM. Many of these concepts have been tackled in depth in the previous chapter: Dynamical Forecasting Methods
Deterministic Dynamical Systems¶
“Deterministic” means there’s no randomness in the system (even if it may look random, e.g. chaos). “Dynamical” means the values or “states” of the system change over time. “System” means it’s a set of things that interact with each other.
Attractors¶

An attractor is a “space” of states that the system tends to get attracted to as time goes on. When attractors can be thought of as curved spaces, they are called “manifolds.” I like to think of attractors as a way to summarize our system, like an embedding layer in a neural network architecture.
Q: What do you think is the simplest type of attractor?
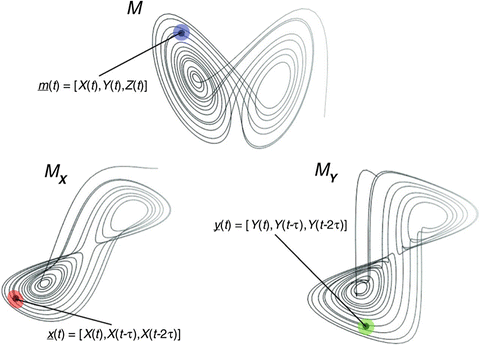
Takens’ Embedding Theorem and Shadow Manifolds¶

Uzal, Lucas & Grinblat, G & Verdes, Pablo. (2011). Optimal reconstruction of dynamical systems: A noise amplification approach. Physical review. E, Statistical, nonlinear, and soft matter physics. 84. 016223. 10.1103/PhysRevE.84.016223.
From the term “shadow”, shadow manifolds are “projections” of the true system manifold on some variable \(X\). What Takens’ theorem tells us is if \(X\) belongs to a system \(S\) then we can generate a shadow manifold of the true manifold \(M_s\) using vectors of lagged (historical) values of \(X\). The points in this shadow manifold \(M_x\) will have a 1:1 correspondence with the points in the true (unknown) manifold \(M_s\).
Overview of CCM¶
Tsonis A.A., Deyle E.R., Ye H., Sugihara G. (2018) Convergent Cross Mapping: Theory and an Example. In: Tsonis A. (eds) Advances in Nonlinear Geosciences. Springer, Cham. https://doi.org/10.1007/978-3-319-58895-7_27
Cross Mapping¶
In a system \(Y=f(X,Y)\), cross Mapping means given the points on the manifold of one variable \(M_y\), we look for the corresponding points on \(M_x\), i.e. points at the same time \(t\).
If \(X\) causes \(Y\), then we say some information about \(X\) gets stored in \(Y\). If this is the case, then we can predict the values of \(X\) given values from \(Y\). Note that this sounds counter intuitive. We contrast this with Granger causality which says that \(X\) causes \(Y\) if we can predict \(Y\) better given \(X\).
We use shadow manifolds because we do not know the true manifold of the system. Given Takens’ theorem however, we can say that we can compute shadow manifolds \(M_x\) and \(M_y\) which then cross map with 1:1 correspondence to the true manifold of the system.
If we use the analogy that manifolds are “summaries” of system, we can think of \(M_x\) and \(M_y\) as summaries of \(X\) and \(Y\). If \(X\) causes \(Y\), information from \(X\) gets embedded in \(Y\). It follows that we can then use \(M_x\) to predict \(Y\), i.e. \(\hat{Y}|M_x\). Finally, we can use the “accuracy” (MAE, MSE, or correlation) of this prediction as our metric for causality.
Convergence¶
Convergence in CCM means that for variables with causalities, the longer our observation period (or more data we gather), the better we can predict one variable using the other. In the attractor example above, we can imagine the attractor will get denser as time goes on since our system will eventually fill in some of the gaps in the manifold. Stated another way, more defined manifolds imply that for variables with causalities, we can expect the accuracy of \(\hat{Y}|M_x\) to improve. If two variables have no causal link, then improving their manifolds will not translate to improvement in predictions.
Cross mapping and convergence are two requirements in the CCM framework that we need to satisfy to consider the possiblity of causality between variables.
Defining our Sample System¶
We show here a sample nonlinear system. Here, we explicitly defined \(X\) to be influenced by \(Y\) and vice versa. The effect of \(X\) on \(Y\) is a factor of \(\beta_{y,x}\) and the effect of \(Y\) on \(X\) is a factor of \(\beta_{x,y}\). One way to read \(\beta_{y,x}\): “the influence of \(x\) on \(y\)”. \(r_x\) and \(r_y\) are some constants that affect how chaotic the system is. As we increase \(r\) say \(r > 3.5\) we get more unpredictable (“chaotic”) behavior.
\(X(t+1)=X(t)[r_x-r_xX_t-\beta_{x,y}Y(t)]\)
\(Y(t+1)=Y(t)[r_y-r_yY_t-\beta_{y,x}X(t)]\)
Key questions to keep in mind are:
Can we detect the causality or interaction between these two variables by looking at the correlation between them?
Can convergent cross mapping help us find this out?
import jdc # used fo defining functions for a class in separate cells
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
from scipy.spatial import distance
from scipy.interpolate import make_interp_spline
from tqdm import tqdm # for showing progress bar in for loops
from scipy.stats import pearsonr
### Just to remove warnings to prettify the notebook.
import warnings
warnings.filterwarnings("ignore")
def func_1(A, B, r, beta):
return A * (r - r * A - beta * B)
# params
r_x = 3.8
r_y = 3.5
B_xy = 0.02 # effect on x given y (effect of y on x)
B_yx = 0.1 # effect on y given x (effect of x on y)
X0 = 0.4 # initial val
Y0 = 0.2 # initial val
t = 5000 # time steps
X = [X0]
Y = [Y0]
for i in range(t):
X_ = func_1(X[-1], Y[-1], r_x, B_xy)
Y_ = func_1(Y[-1], X[-1], r_y, B_yx)
X.append(X_)
Y.append(Y_)
plt.figure(figsize=(15,2))
max_t = 100
plt.plot(X[:max_t], linewidth=1.25, label='X')
plt.plot(Y[:max_t], linewidth=1.25, label='Y')
plt.xlabel('timestep', size=12)
plt.ylabel('value of X or Y', size=12)
plt.legend(prop={'size': 16})
<matplotlib.legend.Legend at 0x7f8ad660ec10>

# correlations in the first 1000 time steps
max_t = 1000
x, y = X[:max_t], Y[:max_t]
plt.scatter(x, y, s=5)
plt.xlabel('X(t)', size=12)
plt.ylabel('Y(t)', size=12)
plt.show()
r, p = pearsonr(x, y)
r, p
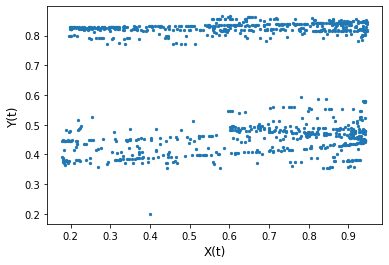
(0.005395539983091772, 0.8646878689811068)
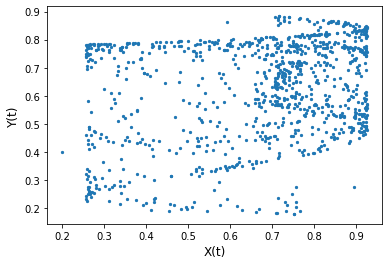
Discussion
Though we explicitly defined \(Y\) to be a function of \(X\) (\(X\) influences \(Y\)), we find no correlation between them in the long term.
It’s hard to conclude the relationship between \(X\) and \(Y\) (e.g. whether or not \(X\) influences \(Y\) or vice versa) based on the correlation plot and correlation value.
CCM Algorithm¶
Given two time series
\(X = \{X(1), X(2), ..., X(L)\}\) and \(Y = \{Y(1), Y(2), ..., Y(L)\}\) where \(L\) is time series length
Compute lagged-coordinate vectors where \(E\) is an “embedding” dimension. Search algorithms e.g. grid search can be used to identify what the best \(E\) value is. \(\tau\) is the lag step.
\(\underline{x}(t) = <X(t), X(t-\tau), X(t-2\tau), ..., X(t-(E-1)\tau)>\) for \(t \in [1+(E-1)\tau, L]\)
Define the “shadow (attractor) manifold” \(M_x = \{\underline{x}(t) \text{ for each } t \in [1+(E-1)\tau, L]\}\)
At \(t\), locate \(\underline{x}(t)\) in \(M_x\)
Find the \(E+1\) nearest neighbor vectors from selected vector \(\underline{x}(t)\). Sugihara, et al. noted that \(E+1\) is the minimum number of points needed for an “embedding/simplex” with \(E\) dimensions. Intuitively, if you have a 2D matrix, you need 3 points (2 + 1) to “triangulate” a point
Denote the time indices of the \(E+1\) nearest neighbors of \(\underline{x}(t)\) by \(t_1, ..., t_{E+1}\). These indices will be used to identify the corresponding points in \(Y\).
Define the model that predicts \(Y\) given \(M_x\) as \(\hat{Y} | M_x = \Sigma{w_iY(t_i)}\) where \(i = 1 ... E+1\) where \(w_i\) is the weight that we multiply by the corresponding \(Y(t_i)\)
\(w_i = u_i / \Sigma{u_j}\) where \(j = 1...E+1\)
\(u_i = exp[-d(\underline{x}(t), \underline{x}(t_i))/d(\underline{x}(t), \underline{x}(t_1))]\) where \(d(\underline{x}(s), \underline{x}(t))\) is a Euclidean distance. Note that we divide by \(d(x(t), x(t_1))\) to “scale” the distances as a multiples of the distance to the closest point. The intuition here is the farther away the neighbor, the lower the weight by some \(exp^-k\)
If \(X\) and \(Y\) are dynamically “coupled” i.e. one influences the other, a clump of points in \(M_x\) should correspond to a clump of points in \(M_y\). And as \(L\) increases, we get a denser cluster of \(E+1\) points from \(M_x\) that correspond to a denser cluster of points in \(M_y\). Given this, \(\hat{Y} | M_x\) intuitively should converge to \(Y\) as \(L\) increases, e.g. we get more data/samples. Hence, we can test for convergence of the nearest neighbors to test for correspondence between states on \(M_x\) and \(M_y\).
We then plot the correlation coefficients between \(Y\) and \(\hat{Y} | M_x\). If there is significant correlation, this means we have enough information from \(Y\) that is stored in \(X\). We say that \(Y\) influences \(X\). It sounds counter intuitive but another way to think about it is: if \(Y\) influences \(X\) then information from \(Y\) gets stored in \(X\). We can thus use \(X\) to predict \(Y\). Same goes for \(X\) influencing \(Y\).
Defining CCM Functions¶
# Computing "Causality" (Correlation between True and Predictions)
class ccm:
def __init__(self, X, Y, tau=1, E=2, L=500):
'''
X: timeseries for variable X that could cause Y
Y: timeseries for variable Y that could be caused by X
tau: time lag
E: shadow manifold embedding dimension
L: time period/duration to consider (longer = more data)
We're checking for X -> Y
'''
self.X = X
self.Y = Y
self.tau = tau
self.E = E
self.L = L
self.My = self.shadow_manifold(Y) # shadow manifold for Y (we want to know if info from X is in Y)
self.t_steps, self.dists = self.get_distances(self.My) # for distances between points in manifold
%%add_to ccm
def shadow_manifold(self, X):
"""
Given
X: some time series vector
tau: lag step
E: shadow manifold embedding dimension
L: max time step to consider - 1 (starts from 0)
Returns
{t:[t, t-tau, t-2*tau ... t-(E-1)*tau]} = Shadow attractor manifold, dictionary of vectors
"""
X = X[:L] # make sure we cut at L
M = {t:[] for t in range((self.E-1) * self.tau, self.L)} # shadow manifold
for t in range((self.E-1) * self.tau, self.L):
x_lag = [] # lagged values
for t2 in range(0, self.E-1 + 1): # get lags, we add 1 to E-1 because we want to include E
x_lag.append(X[t-t2*self.tau])
M[t] = x_lag
return M
%%add_to ccm
# get pairwise distances between vectors in X
def get_distances(self, Mx):
"""
Args
Mx: The shadow manifold from X
Returns
t_steps: timesteps
dists: n x n matrix showing distances of each vector at t_step (rows) from other vectors (columns)
"""
# we extract the time indices and vectors from the manifold Mx
# we just want to be safe and convert the dictionary to a tuple (time, vector)
# to preserve the time inds when we separate them
t_vec = [(k, v) for k,v in Mx.items()]
t_steps = np.array([i[0] for i in t_vec])
vecs = np.array([i[1] for i in t_vec])
dists = distance.cdist(vecs, vecs)
return t_steps, dists
%%add_to ccm
def get_nearest_distances(self, t, t_steps, dists):
"""
Args:
t: timestep of vector whose nearest neighbors we want to compute
t_teps: time steps of all vectors in Mx, output of get_distances()
dists: distance matrix showing distance of each vector (row) from other vectors (columns). output of get_distances()
E: embedding dimension of shadow manifold Mx
Returns:
nearest_timesteps: array of timesteps of E+1 vectors that are nearest to vector at time t
nearest_distances: array of distances corresponding to vectors closest to vector at time t
"""
t_ind = np.where(t_steps == t) # get the index of time t
dist_t = dists[t_ind].squeeze() # distances from vector at time t (this is one row)
# get top closest vectors
nearest_inds = np.argsort(dist_t)[1:self.E+1 + 1] # get indices sorted, we exclude 0 which is distance from itself
nearest_timesteps = t_steps[nearest_inds] # index column-wise, t_steps are same column and row-wise
nearest_distances = dist_t[nearest_inds]
return nearest_timesteps, nearest_distances
%%add_to ccm
def predict(self, t):
"""
Args
t: timestep at Mx to predict Y at same time step
Returns
Y_true: the true value of Y at time t
Y_hat: the predicted value of Y at time t using Mx
"""
eps = 0.000001 # epsilon minimum distance possible
t_ind = np.where(self.t_steps == t) # get the index of time t
dist_t = self.dists[t_ind].squeeze() # distances from vector at time t (this is one row)
nearest_timesteps, nearest_distances = self.get_nearest_distances(t, self.t_steps, self.dists)
# get weights
u = np.exp(-nearest_distances/np.max([eps, nearest_distances[0]])) # we divide by the closest distance to scale
w = u / np.sum(u)
# get prediction of X
X_true = self.X[t] # get corresponding true X
X_cor = np.array(self.X)[nearest_timesteps] # get corresponding Y to cluster in Mx
X_hat = (w * X_cor).sum() # get X_hat
return X_true, X_hat
%%add_to ccm
def causality(self):
'''
Args:
None
Returns:
correl: how much self.X causes self.Y. correlation between predicted Y and true Y
'''
# run over all timesteps in M
# X causes Y, we can predict X using My
# X puts some info into Y that we can use to reverse engineer X from Y
X_true_list = []
X_hat_list = []
for t in list(self.My.keys()): # for each time step in My
X_true, X_hat = self.predict(t) # predict X from My
X_true_list.append(X_true)
X_hat_list.append(X_hat)
x, y = X_true_list, X_hat_list
r, p = pearsonr(x, y)
return r, p
Functions for Visualizing¶
%%add_to ccm
def visualize_cross_mapping(self):
"""
Visualize the shadow manifolds and some cross mappings
"""
# we want to check cross mapping from Mx to My and My to Mx
f, axs = plt.subplots(1, 2, figsize=(12, 6))
for i, ax in zip((0, 1), axs): # i will be used in switching Mx and My in Cross Mapping visualization
#===============================================
# Shadow Manifolds Visualization
X_lag, Y_lag = [], []
for t in range(1, len(self.X)):
X_lag.append(X[t-tau])
Y_lag.append(Y[t-tau])
X_t, Y_t = self.X[1:], self.Y[1:] # remove first value
ax.scatter(X_t, X_lag, s=5, label='$M_x$')
ax.scatter(Y_t, Y_lag, s=5, label='$M_y$', c='y')
#===============================================
# Cross Mapping Visualization
A, B = [(self.Y, self.X), (self.X, self.Y)][i]
cm_direction = ['Mx to My', 'My to Mx'][i]
Ma = self.shadow_manifold(A)
Mb = self.shadow_manifold(B)
t_steps_A, dists_A = self.get_distances(Ma) # for distances between points in manifold
t_steps_B, dists_B = self.get_distances(Mb) # for distances between points in manifold
# Plot cross mapping for different time steps
timesteps = list(Ma.keys())
for t in np.random.choice(timesteps, size=3, replace=False):
Ma_t = Ma[t]
near_t_A, near_d_A = self.get_nearest_distances(t, t_steps_A, dists_A)
for i in range(E+1):
# points on Ma
A_t = Ma[near_t_A[i]][0]
A_lag = Ma[near_t_A[i]][1]
ax.scatter(A_t, A_lag, c='b', marker='s')
# corresponding points on Mb
B_t = Mb[near_t_A[i]][0]
B_lag = Mb[near_t_A[i]][1]
ax.scatter(B_t, B_lag, c='r', marker='*', s=50)
# connections
ax.plot([A_t, B_t], [A_lag, B_lag], c='r', linestyle=':')
ax.set_title(f'{cm_direction} cross mapping. time lag, tau = {tau}, E = 2')
ax.legend(prop={'size': 14})
ax.set_xlabel('$X_t$, $Y_t$', size=15)
ax.set_ylabel('$X_{t-1}$, $Y_{t-1}$', size=15)
plt.show()
%%add_to ccm
def plot_ccm_correls(self):
"""
Args
X: X time series
Y: Y time series
tau: time lag
E: shadow manifold embedding dimension
L: time duration
Returns
None. Just correlation plots
"""
M = self.shadow_manifold(self.Y) # shadow manifold
t_steps, dists = self.get_distances(M) # for distances
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
X_My_true, X_My_pred = [], [] # note pred X | My is equivalent to figuring out if X -> Y
Y_Mx_true, Y_Mx_pred = [], [] # note pred Y | Mx is equivalent to figuring out if Y -> X
for t in range(tau, L):
true, pred = ccm_XY.predict(t)
X_My_true.append(true)
X_My_pred.append(pred)
true, pred = ccm_YX.predict(t)
Y_Mx_true.append(true)
Y_Mx_pred.append(pred)
# # plot
figs, axs = plt.subplots(1, 2, figsize=(12, 5))
# predicting X from My
r, p = np.round(pearsonr(X_My_true, X_My_pred), 4)
axs[0].scatter(X_My_true, X_My_pred, s=10)
axs[0].set_xlabel('$X(t)$ (observed)', size=12)
axs[0].set_ylabel('$\hat{X}(t)|M_y$ (estimated)', size=12)
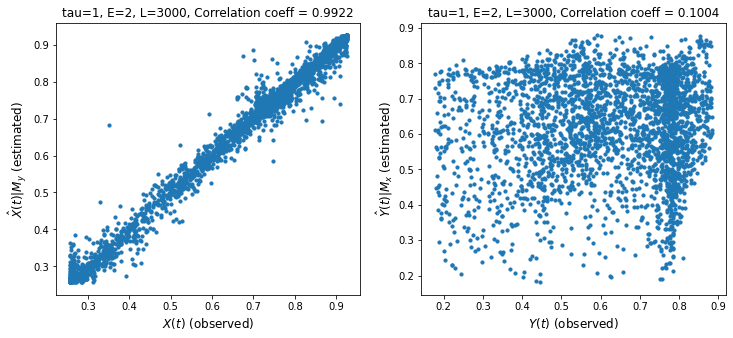
axs[0].set_title(f'tau={tau}, E={E}, L={L}, Correlation coeff = {r}')
# predicting Y from Mx
r, p = np.round(pearsonr(Y_Mx_true, Y_Mx_pred), 4)
axs[1].scatter(Y_Mx_true, Y_Mx_pred, s=10)
axs[1].set_xlabel('$Y(t)$ (observed)', size=12)
axs[1].set_ylabel('$\hat{Y}(t)|M_x$ (estimated)', size=12)
axs[1].set_title(f'tau={tau}, E={E}, L={L}, Correlation coeff = {r}')
plt.show()
Applying CCM to our Sample Systems¶
Can CCM predict causality in our test system?¶
Remember our test system is:
\(X(t+1)=X(t)[r_x-r_xX_t-\beta_{x,y}Y(t)]\)
\(Y(t+1)=Y(t)[r_y-r_yY_t-\beta_{y,x}X(t)]\)
# Initialize test dataset
# params
r_x = 3.8
r_y = 3.5
B_xy = 0.02 # effect on x given y (effect of y on x)
B_yx = 0.1 # effect on y given x (effect of x on y)
X0 = 0.4 # initial val
Y0 = 0.2 # initial val
t = 5000 # time steps
X = [X0]
Y = [Y0]
for i in range(t):
X_ = func_1(X[-1], Y[-1], r_x, B_xy)
Y_ = func_1(Y[-1], X[-1], r_y, B_yx)
X.append(X_)
Y.append(Y_)
# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = 500 # length of time period to consider
ccm1 = ccm(X, Y, tau, E, L)
ccm1.visualize_cross_mapping()
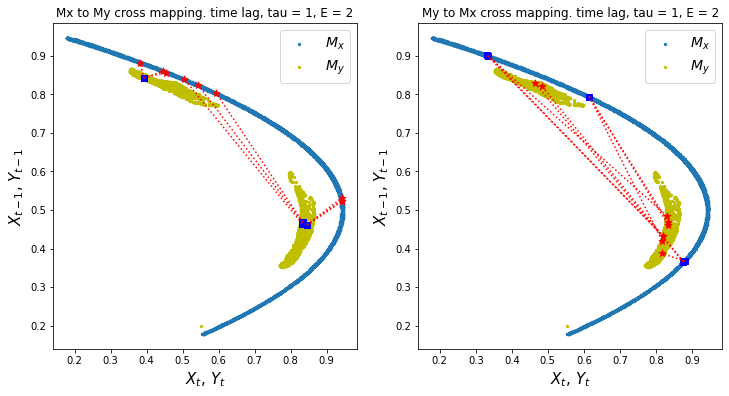
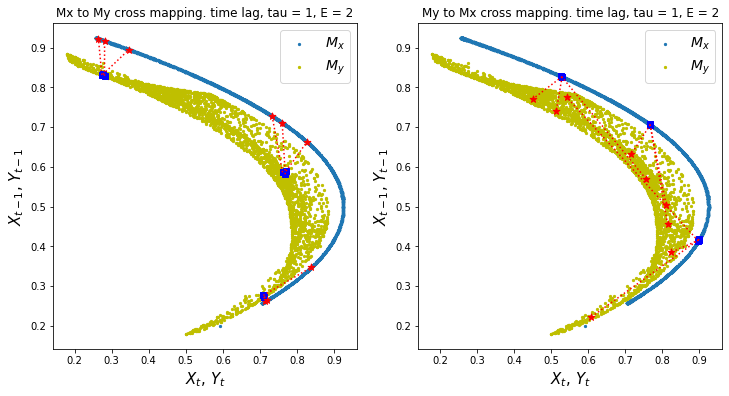
Discussion
In the shadow manifolds above, we show the cross mapping of points from one manifold (blue box) to the corresponding points on the other manifold (red star)
If values from one manifold e.g. \(M_x\) make a spread out cross mapping to values on another manifold e.g. \(M_y\), this means that we are not able to precisely predict \(M_y\) or \(Y\) given \(M_x\). This implies that not much information from \(Y\) is transferred to \(X\) to make highly precise predictions. In other words, \(Y\) may drive \(X\) but not by much.
The stronger the causality between variables, the more narrow the cross mapping is more narrow, e.g. cross mapping \(M_x\) from \(M_y\) (left chart) has a relatively narrow cross mapping which may imply that \(X\) influences \(Y\).
While narrow cross convergence may indicate causality, this is just one of two criteria to conclude causality. We also need to satisfy convergence which we will discuss next.
# let us plot the performance of the cross mapping predictions using correlation
L = 3000
tau = 1
E = 2
ccm1.plot_ccm_correls()
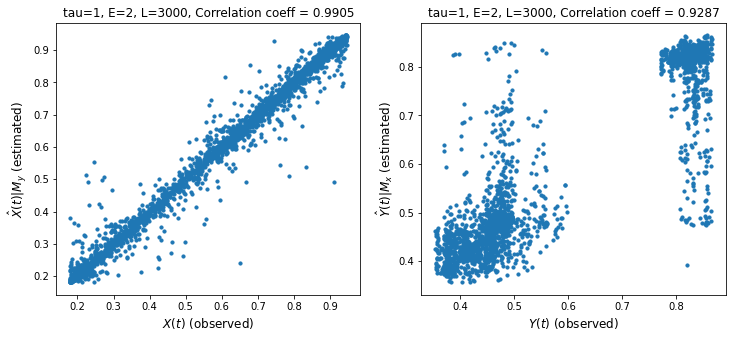
Discussion
We measure cross mapping using correlation. A stronger correlation is one indicator of stronger causality.
The left chart shows the performance of the cross mapping from \(M_y\) to \(M_x\) to predict \(X(t)\). This means we can predict \(X\) given \(Y\) which happens if \(Y\) has enough information about \(X\). We say that \(X\) strongly influences or causes \(Y\). Remember the intuition that if \(X\) causes \(Y\), then information from \(X\) gets transferred to \(Y\).
We have shown cross-mapping in both directions though one direction is stronger.
# Looking at "convergence"
L_range = range(50, 3200, 200) # L values to test
tau = 1
E = 2
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
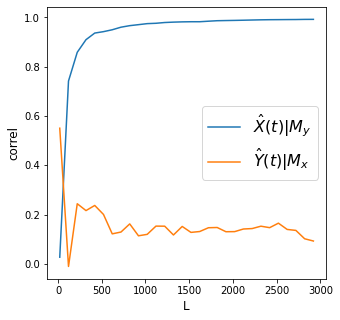
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
<matplotlib.legend.Legend at 0x7f8ac124b4d0>
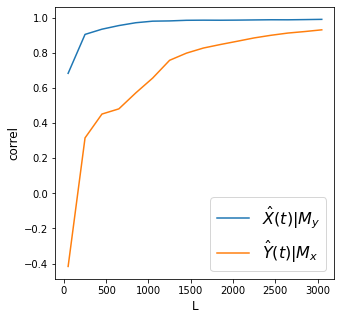
Discussion
Convergence means we are able to improve cross mapping accuracy the longer the period \(L\) we consider. To recap, this happens only when we are able to enhance our reconstruction of the shared attractor between two variables using more data.
In the plot above, we find that both cross mappings converge, however one converges more than the other. We have satisfied the two criteria for CCM: convergence and cross mapping. We can thus say causality exists. However, the magnitudes of causality going from one direction or the other are different.
What can we conclude from this plot about the interactions between \(X\) and \(Y\)?
Which variable has more influence on the other?
How Betas Affect Causality As Indicated By Convergence¶
# Checking convergence for various betas
# params
X0 = 0.4 # initial val
Y0 = 0.4 # initial val
t = 400 # time steps for the dataset
L = 400 # time steps for computing CCM
E = 2 # embedding dimensions
range_ = list(np.arange(0, 0.41, 0.02)) # B ranges
correl_diffs = np.zeros(shape=(len(range_), len(range_))) # correlation list
np.random.seed(42)
for ind_B_xy in range(len(range_)): # effect on x given y (effect of y on x)
for ind_B_yx in range(len(range_)): # effect on y given x (effect of x on y)
r_x = np.random.choice(np.arange(3.6, 4.1, 0.01)) # paper implies random sampling
r_y = np.random.choice(np.arange(3.6, 4.1, 0.01)) # paper implies random sampling
B_xy = range_[ind_B_xy]
B_yx = range_[ind_B_yx]
# initialize dataset
X, Y = [X0], [Y0]
for i in range(t):
X_ = func_1(X[-1], Y[-1], r_x, B_xy)
Y_ = func_1(Y[-1], X[-1], r_y, B_yx)
X.append(X_)
Y.append(Y_)
# there are some combinations that throw an error
# couldn't find the cause but to be fair, Sugihara et al also had "holes" in their chart
try:
# Testing for X -> Y
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object
correl_xy = ccm_XY.causality()[0]
# Testing for Y -> X
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object
correl_yx = ccm_YX.causality()[0]
# get diffs
correl_diffs[ind_B_yx][ind_B_xy] = correl_yx - correl_xy # (y -> x) - (x-> y)
except:
continue
plt.figure(figsize=(5, 5))
plt.matshow(np.nan_to_num(correl_diffs), origin='lower', cmap='jet', fignum=1)
plt.xlabel('Beta_x_y', size=12)
plt.ylabel('Beta_y_x', size=12)
plt.title('$correl(\hat{Y}(t)|M_x) - correl(\hat{X}(t)|M_y$)', size=14)
# plt.xticks(range(len(range_)), np.round(range_, 2), rotation=90)
plt.yticks(range(len(range_)), np.round(range_, 2))
plt.colorbar()
plt.tight_layout()
plt.show()
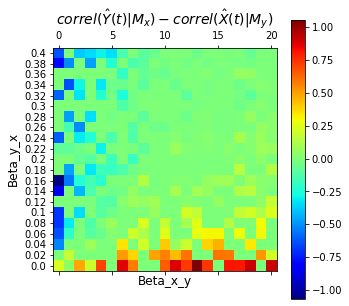
Discussion
The chart above shows the difference in predictive performance \(\rho(\hat{Y}|M_x) - \rho(\hat{X}|M_y)\) for different \(\beta_{y,x}\) and \(\beta_{x,y}\). Remember that \(\beta_{y,x}\) is how much \(X\) influences \(Y\) and that a higher score \(\rho(\hat{X}|M_y)\) means we are able to predict \(X\) better from \(Y\) indicating that much of information from \(X\) gets stored in \(Y\) or in other words, \(X\) causes \(Y\). Note that the “spots” in the chart can be due to our randomization of the value of \(r_x\) and \(r_y\) in each iteration. (We followed the method of randomizing \(r\) as implied in the supplemental materials in Sugihara et al’s paper. Their chart also has spots.)
Based on the plot, as \(\beta_{y,x}\) increases, what happens to our predicted \(\hat{Y}|M_x\) and \(\hat{X}|M_y\)?
Do the results align with our intuition that higher \(\beta_{y,x}\) means higher effect of \(X\) on \(Y\)?
What if asymmetrically coupled (the effect is only in one direction)?¶
Let us define our system as
\(X(t+1)=X(t)[3.7-3.7X_t-0Y(t)]\)
\(Y(t+1)=Y(t)[3.7-3.7Y_t-0.32X(t)]\)
Are we convinced that this system has causality in one direction only?
# Initialize test dataset
# params
r_x = 3.7
r_y = 3.7
B_xy = 0 # effect on x given y (effect of y on x)
B_yx = 0.32 # effect on y given x (effect of x on y)
X0 = 0.2 # initial val following Sugihara et al
Y0 = 0.4 # initial val following Sugihara et al
t = 3000 # time steps
X = [X0]
Y = [Y0]
for i in range(t):
X_ = func_1(X[-1], Y[-1], r_x, B_xy)
Y_ = func_1(Y[-1], X[-1], r_y, B_yx)
X.append(X_)
Y.append(Y_)
plt.figure(figsize=(15,2))
max_t = 100
plt.plot(X[:max_t], linewidth=1.25, label='X')
plt.plot(Y[:max_t], linewidth=1.25, label='Y')
plt.xlabel('timestep', size=12)
plt.ylabel('value of X or Y', size=12)
plt.legend(prop={'size': 16})
<matplotlib.legend.Legend at 0x7f8ac12a0c10>

# correlations in the first 1000 time steps
max_t = 1000
x, y = X[:max_t], Y[:max_t]
plt.scatter(x, y, s=5)
plt.xlabel('X(t)', size=12)
plt.ylabel('Y(t)', size=12)
plt.show()
# np.corrcoef(x, y)[0][1]
r, p = pearsonr(x, y)
r, p
(0.24813484131913208, 1.6963889777954784e-15)
# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(42) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = 500 # length of time period to consider
ccm1 = ccm(X, Y, tau, E, L)
ccm1.visualize_cross_mapping()
Discussion
What can you observe about the cross mappings between the two manifolds in this system? Remember that the direction of cross mapping is from the blue squares to the red stars
Is this something that we expected?
# let us plot the performance of the cross mapping predictions using correlation
L = 3000
tau = 1
E = 2
ccm1.plot_ccm_correls()
# Looking at "convergence"
L_range = range(20, 3000, 100) # L values to test
tau = 1
E = 2
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.99 p value 0.0
Y->X r 0.09 p value 0.0
Discussion
How do we interpret these charts in the context of determining causality using the CCM framework?
Are the results here expected?
Effect of “Strong Forcing”¶
What happens to the result of CCM when \(X\) has very strong effects on \(Y\) yet \(Y\) has 0 effect on \(X\)?
\(X(t+1)=X(t)[3.7-3.7X_t-0Y(t)]\)
\(Y(t+1)=Y(t)[3.7-3.7Y_t- \beta_{yx} X(t)] \text{ where } \beta_{yx} \text{is large}\)
# Initialize test dataset
# params
# values for B_yx
# we query an array using B_yx_dict[B_yx value][X or Y]
B_yx_dict = {np.round(k, 2):{'X':[], 'Y':[]} for k in np.arange(0, 1.6, 0.2)}
r_x = 3.7
r_y = 3.7
X0 = 0.2 # initial val following Sugihara et al
Y0 = 0.4 # initial val following Sugihara et al
t = 2000 # time steps
for k in B_yx_dict.keys():
B_xy = 0 # effect on x given y (effect of y on x)
B_yx = k # effect on y given x (effect of x on y)
X = [X0]
Y = [Y0]
for i in range(t):
X_ = func_1(X[-1], Y[-1], r_x, B_xy)
Y_ = func_1(Y[-1], X[-1], r_y, B_yx)
X.append(X_)
Y.append(Y_)
B_yx_dict[k]['X'] += X
B_yx_dict[k]['Y'] += Y
# Looking at "convergence" for different B_yx values
L_range = range(100, 1000, 100) # L values to test
tau = 1
E = 2
B_yx_list = []
L_list = []
Yhat_Mx_list = []
Xhat_My_list = []
for B_yx in B_yx_dict.keys():
X = B_yx_dict[B_yx]['X']
Y = B_yx_dict[B_yx]['Y']
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
B_yx_list.append(B_yx)
L_list.append(L)
Xhat_My_list.append(ccm_XY.causality()[0]) # wont be used
Yhat_Mx_list.append(ccm_YX.causality()[0])
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure(figsize=(6, 4))
ax = fig.add_subplot(111, projection='3d')
x = np.array(L_list)
y = np.array(B_yx_list)
z = np.array(Yhat_Mx_list)
ax.plot_trisurf(x, y, z, cmap='jet', antialiased=True)
ax.set_xlabel('L', size=14)
ax.set_ylabel('$B_{yx}$', size=14)
ax.set_zlabel('correl $\hat{Y}|M_x$', size=16)
ax.set_zlim(0, 1)
plt.tight_layout()
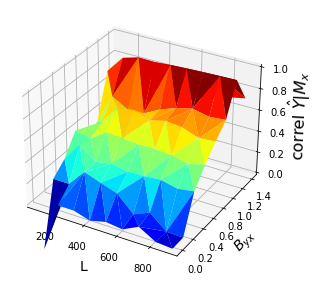
Discussion
Remember that if \(Y\) causes \(X\), information from \(Y\) is embedded in \(X\) and we should be able to predict \(Y\) given the shadow manifold \(M_x\).
We find that despite \(Y\) having no influence on \(X\), CCM gives a high cross mapping performance if the influence of \(X\) on \(Y\), \(\beta_{yx}\) is very high. This is what we call “strong forcing.” An intuition here is if the effect of \(X\) on \(Y\) is too high, \(Y\) tends to look a lot likt \(X\) and thus \(M_x\) becomes easier to cross map to \(M_y\), which shouldn’t be the case. We can thus be misled to think bidirectional causality exists when it doesn’t.
What are the implications when using CCM to infer causality?
Application in Real World Systems¶
Here, we apply CCM on real world systems to infer relationships between variables.
def make_plots(df, dt_name, val1_name, val2_name):
# drop nulls
df = df[[dt_name, val1_name, val2_name]].dropna()
# plot
f, ax = plt.subplots(figsize=(15, 2))
df.plot(x=dt_name, y=val1_name, label=None, ax=ax)
ax.set_ylabel(val1_name)
ax2 = ax.twinx()
df.plot(x=dt_name, y=val2_name, label=None, ax=ax2, c='orange')
ax2.set_ylabel(val2_name)
# ax.figure.legend()
plt.title(f"{val1_name} and {val2_name}, correlation coefficient: {r}")
plt.tight_layout()
plt.show()
Nicolas Cage Films and Number of Drowned Victims in the US¶
We check how much the number of drowned victims in the US affect the number of Nicolas Cage Films for the year and vice versa. Do we expect these two to be causally linked?
df = pd.read_csv('../data/cage_drowning.csv')
df['year'] = range(1999, 2010)
make_plots(df, 'year', 'num.drowned', 'num.cage.films')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['num.cage.films'].values
X = df['num.drowned'].values
# Looking at "convergence"
L_range = range(3, L+1, 1) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.21 p value 0.55
Y->X r -0.11 p value 0.77
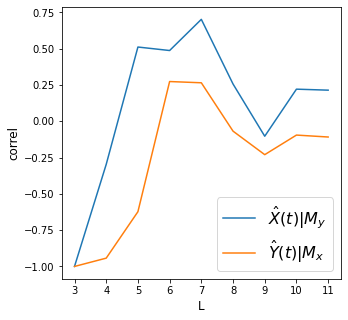
Discussion
Although for time period up to 7, it might look like there is convergence as shown by improvement in crossmapping correlation, proceeding further results in drop in convergence. We conclude that these two variables are not causally linked.
Dam System¶
We then look at two dam systems in the Philippines: Angat Dam and Ipo Dam as well as rainfall and irrigation water flow rate (NIA).
Angat Dam vs Rain¶
# Num Angat Dam Level vs NIA (what is NIA?)
df = pd.read_csv('../data/Angat_dataset.csv')
make_plots(df, 'Time', 'Dam', 'Rain')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['Dam'].values
X = df['Rain'].values
# Looking at "convergence"
L_range = range(100, L+1, 100) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 4))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 4))
Discussion
Rain’s effect on dam levels shows some convergence as we increase the time period \(L\). However, convergence is not clear on the effect of dam level on rain.
Angat Dam vs NIA¶
# Num Angat Dam Level vs NIA (what is NIA?)
df = pd.read_csv('../data/Angat_dataset.csv')
make_plots(df, 'Time', 'Dam', 'NIA')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['Dam'].values
X = df['NIA'].values
# Looking at "convergence"
L_range = range(100, L+1, 100) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.59 p value 0.0
Y->X r 0.65 p value 0.0
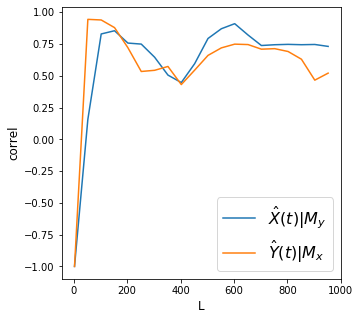
Discussion
Convergence is cleaner for the effect of irrigation water flow on Dam level. However there is still a rather noisy convergence for the effect of dam level on irrigation water flow.
Ipo Dam vs Rain¶
# Num Ipo Dam Level vs NIA (what is NIA?)
df = pd.read_csv('../data/Ipo_dataset.csv')
make_plots(df, 'Time', 'Dam', 'Rain')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['Dam'].values
X = df['Rain'].values
# Looking at "convergence"
L_range = range(100, L+1, 100) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.3 p value 0.0
Y->X r 0.05 p value 0.0
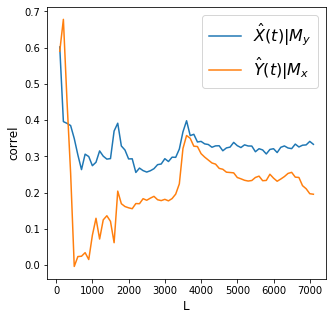
Discussion
Convergence is clear for the effect of rain on dam levels. Meanwhile there is no convergence for the effect of dam levels on rain.
Ipo Dam vs NIA¶
# Num Ipo Dam Level vs NIA (what is NIA?)
df = pd.read_csv('../data/Ipo_dataset.csv')
make_plots(df, 'Time', 'Dam', 'NIA')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['Dam'].values
X = df['NIA'].values
# Looking at "convergence"
L_range = range(100, L+1, 100) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.31 p value 0.0
Y->X r 0.21 p value 0.0
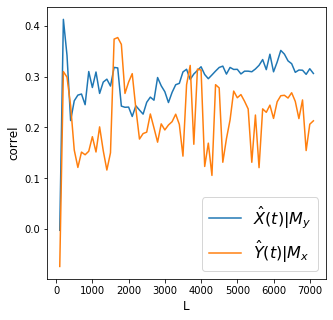
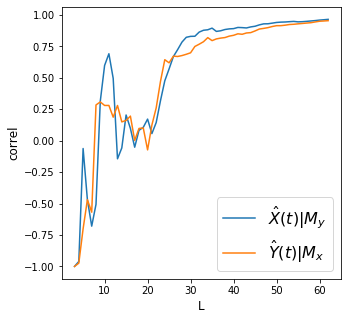
Discussion
Convergence is clear for the effect of irrigation water flow on dam levels but it is not clear for the effect of dam levels on irrigation water flow.
Ipo Dam vs Angat Dam¶
# Num Ipo Dam Level vs Angat Dam Level
df1 = pd.read_csv('../data/Ipo_dataset.csv')[['Time', 'Dam']]
df1.rename(columns={'Dam':'Ipo_Dam'}, inplace=True)
df2 = pd.read_csv('../data/Angat_dataset.csv')[['Time', 'Dam']]
df2.rename(columns={'Dam':'Angat_Dam'}, inplace=True)
df = df1.merge(df2, on='Time')
make_plots(df, 'Time', 'Ipo_Dam', 'Angat_Dam')

# Visualize simple shadow manifolds Mx and My for different tau
# We visualize Cross-Mapping
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
Y = df['Ipo_Dam'].values
X = df['Angat_Dam'].values
# Looking at "convergence"
L_range = range(100, L+1, 100) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.33 p value 0.0
Y->X r 0.2 p value 0.0
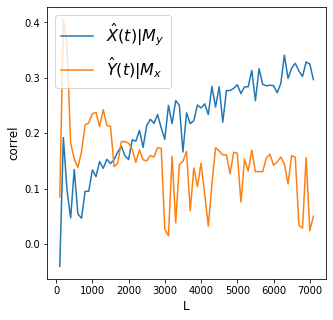
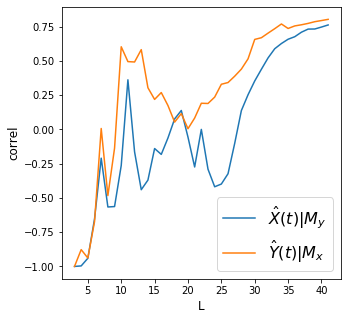
Discussion
The effect of Angat dam level is stronger on Ipo than the reverse. Also note that convergence is not clear for the effect of Ipo dam level on Angat dam level.
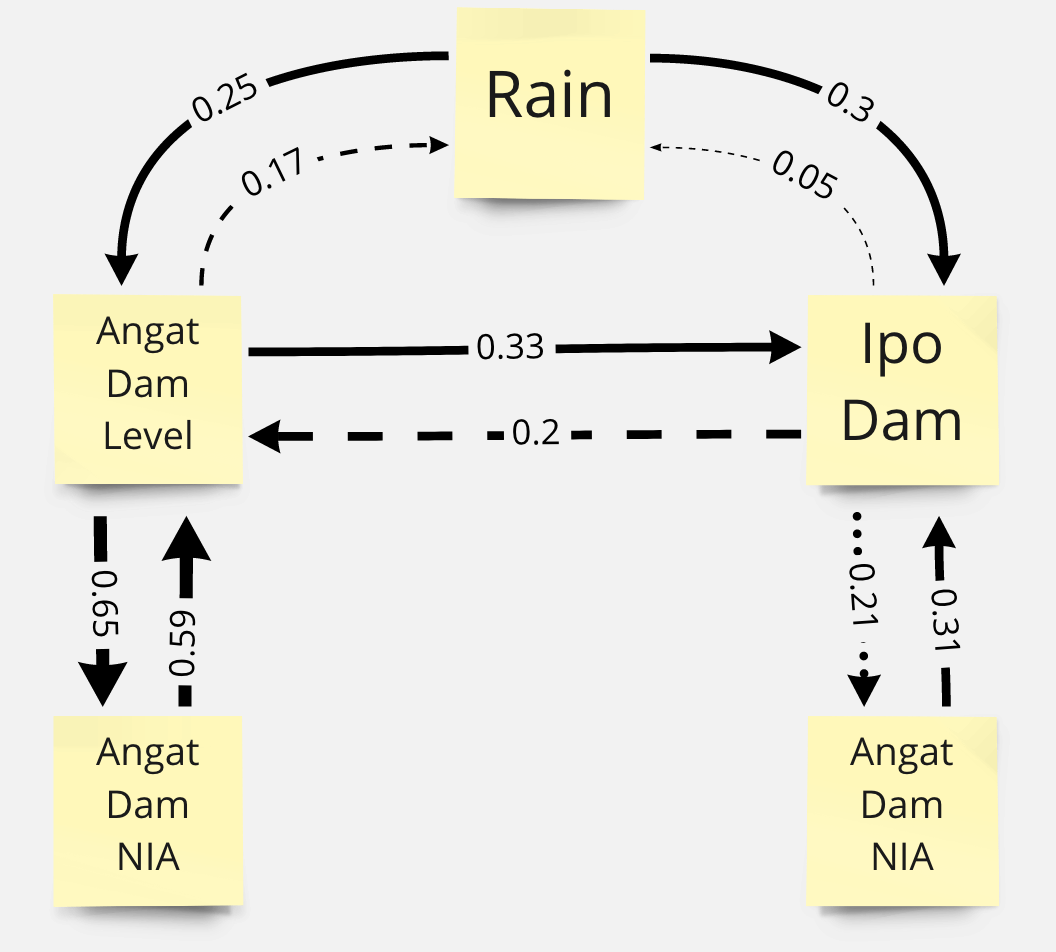
Dam System Inferred Causal Relationships¶
Based on the results above, we can infer a network of causal relationships. Relationships with unclear convergence are shown in broken lines while relationships with clear convergence are shown in solid lines.
Jena climate data¶
Here, we look at at some climate data taken from the Max Planck Institute for Biogeochemistry in Jena, Germany from 2009 to 2016
df = pd.read_csv('../data/jena_climate_2009_2016.csv')
df = df.reset_index()
make_plots(df, 'index', 'p (mbar)', 'T (degC)') # plot pressure vs Temperature

np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = 1000 # length of time period to consider
X = df['p (mbar)'].values
Y = df['T (degC)'].values
# Looking at "convergence"
L_range = range(3, L+1, 50) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.73 p value 0.0
Y->X r 0.52 p value 0.0
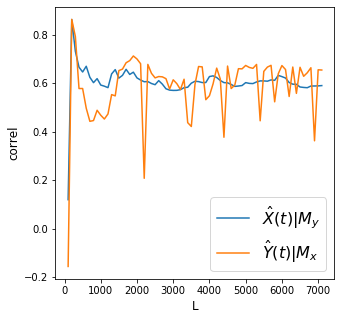
Discussion It seems there is bidirectional (assuming no strong forcing) relationship between pressure and temperature with pressure having more effect on temperature.
Climate change¶
Here, we look at climate data taken from climate.nasa.gov.
CO2 emissions, global temperature, and arctic ice area (Non-ecological)¶
df = pd.read_csv('../data/co2_temp - combined.csv')
make_plots(df, 'year', 'co2_avg', 'diff_temp')

np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = df.shape[0] # length of time period to consider
X = df['co2_avg'].values
Y = df['diff_temp'].values
# Looking at "convergence"
L_range = range(3, L+1, 1) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.96 p value 0.0
Y->X r 0.95 p value 0.0
df2 = df.dropna()
make_plots(df2, 'year', 'co2_avg', 'arctic_ice_area')

X = df2['co2_avg'].values
Y = df2['arctic_ice_area'].values
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = len(X) # length of time period to consider
# Looking at "convergence"
L_range = range(3, L+1, 1) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.76 p value 0.0
Y->X r 0.8 p value 0.0
df2 = df.dropna()
make_plots(df2, 'year', 'diff_temp', 'arctic_ice_area')

X = df2['diff_temp'].values
Y = df2['arctic_ice_area'].values
np.random.seed(1) # we fix the seed when randomly choosing cross mapping points
tau = 1 # time lag
E = 2 # shadow manifold embedding dimensions
L = len(X) # length of time period to consider
# Looking at "convergence"
L_range = range(3, L+1, 1) # L values to test
Xhat_My, Yhat_Mx = [], [] # correlation list
for L in L_range:
ccm_XY = ccm(X, Y, tau, E, L) # define new ccm object # Testing for X -> Y
ccm_YX = ccm(Y, X, tau, E, L) # define new ccm object # Testing for Y -> X
Xhat_My.append(ccm_XY.causality()[0])
Yhat_Mx.append(ccm_YX.causality()[0])
# plot convergence as L->inf. Convergence is necessary to conclude causality
plt.figure(figsize=(5,5))
plt.plot(L_range, Xhat_My, label='$\hat{X}(t)|M_y$')
plt.plot(L_range, Yhat_Mx, label='$\hat{Y}(t)|M_x$')
plt.xlabel('L', size=12)
plt.ylabel('correl', size=12)
plt.legend(prop={'size': 16})
print('X->Y r', np.round(Xhat_My[-1], 2), 'p value', np.round(ccm_XY.causality()[1], 2))
print('Y->X r', np.round(Yhat_Mx[-1], 2), 'p value', np.round(ccm_YX.causality()[1], 2))
X->Y r 0.58 p value 0.0
Y->X r 0.69 p value 0.0
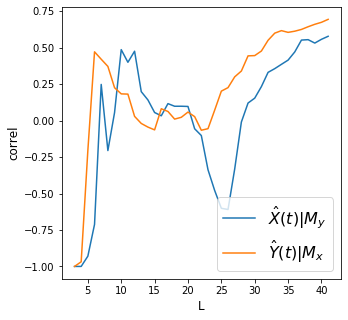
Discussion
We find strong convergence for all variables above.
How do we interpret the plots above? Did we meet the requirement of convergent cross mapping (convergence and cross mapping) to say there’s causality between each pair of variables?
How do we relate the concept of “strong forcing” on how we interpret the results?
Inferred Climate System Causal Relationships¶
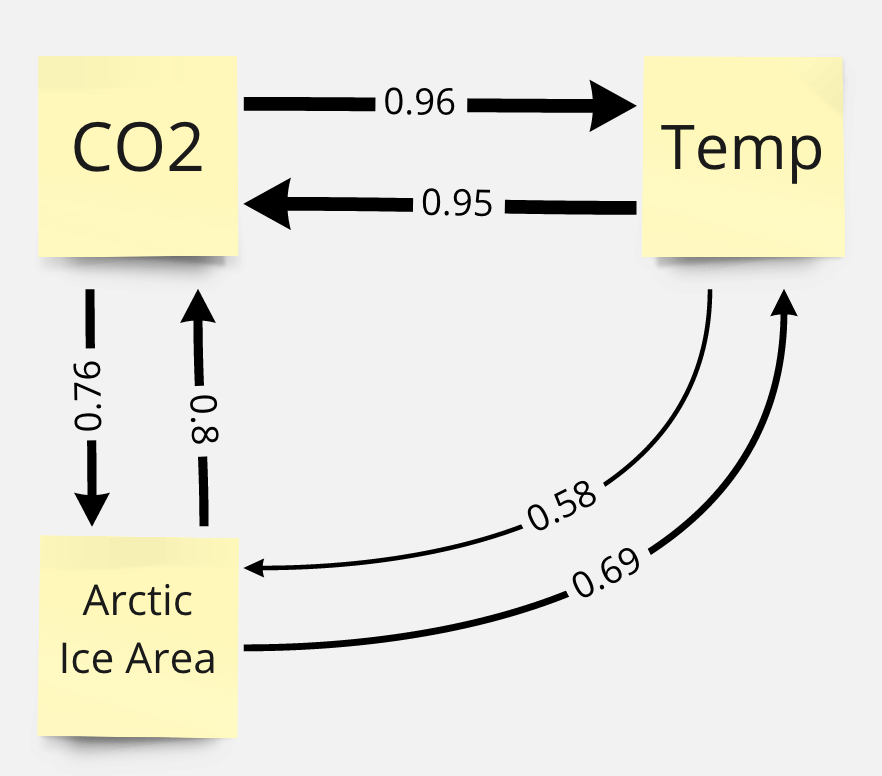
Based on the results above, we can infer a network of causal relationships. There seems to be a strong feedback loops between all three elements in the system. Upon checking past researches on the topic, we find that there are papers that support the seemingly unintuitive interactions in the inferred causal network:
Limitation¶
We have shown how CCM can be a powerful tool for quantifying causalities between variables by using just time series data. However, the CCM has a limitation that we need to acknowledge: when “strong forcing” exists between two variables, bidirectional convergent cross mapping may still happen even with unidirectional causality. We must rule out strong forcing before we can explore if two variables have bidirectional causality.
Summary¶
In this chapter we discussed the theory and algorithm behind Convergent Cross Mapping methodology to infer causality between variables using time series data. We then applied it on simulated and real world data. In the next chapter we will discuss techniques for finding pattens in time series data namely cross correlation, Fourier transform, and Wavelet transform.
References¶
Main references
Supplementary materials
Daon, Y., 2018. Simplex and S-map Algorithms. Comprehensive R Archive Network
Petchey, O., 2016. Simplex projection walkthrough. Zurich Open Repository Archive
Sahil Loomba & Parul Jain. 2016. Causal Computational Models for Gene Regulatory Networks
Uzal, Lucas & Grinblat, G & Verdes, Pablo. (2011). Optimal reconstruction of dynamical systems: A noise amplification approach. Physical review. E, Statistical, nonlinear, and soft matter physics. 84. 016223. 10.1103/PhysRevE.84.016223.
Tsonis A.A., Deyle E.R., Ye H., Sugihara G. (2018) Convergent Cross Mapping: Theory and an Example. In: Tsonis A. (eds) Advances in Nonlinear Geosciences. Springer, Cham. https://doi.org/10.1007/978-3-319-58895-7_27
Datasets